Arduino:
Arduino:简介:特点:主板:实践:搭建环境:认识开发板:Blink示例:ADC、PWM示例:-ADC ( Analog to Digital Converter ):-PWM ( Pulse Width Modulation ):串行通讯:使用库:Arduino标准库有:EEPROM:Servo:Stepper:SD:
简介:
Arduino是一款便捷灵活、方便上手的开源电子原型平台。包含硬件和软件(Arduino IDE)。由一个欧洲开发团队于2005年冬季开发。其成员包括 Massimo Banzi、David Cuartielles、Tom Igoe、Gianluca Martino、David Mellis 和 Nicholas Zambetti 等。
特点:
Arduino IDE可以在 Windows、Mac OS、Linux 三大主流操作系统上运行,而其他的大多数控制器只能在Windows上开发。对于初学者来说,它极易掌控,有足够灵活性,不需要太多基础就可以开发。我初次接触 Arduino 时,仅仅连 MCU 是什么也不知道,但还是开发出了不少东西。不够有一定基础也是非常有必要的,在开发复杂功能时可以少走弯路。(亲身经历)
主板:
目前 Arduino 的主板型号有很多,主要有:
Arduino Uno
Arduino Nano
Arduino LilyPad
Arduino Mega 2560
Arduino Ethernet
Arduino Due
Arduino Leonardo
ArduinoYún
扩展版也有不少:
Arduino GSM Shield
Arduino Ethernet Shield
Arduino WiFi Shield
Arduino Wireless SD Shield
Arduino USB Host Shield
Arduino Motor Shield
Arduino Wireless Proto Shield
Arduino Proto Shield
使用资料:
Arduino基础入门篇28—舵机控制 - 简书 (jianshu.com)
Arduino基础入门篇26—步进电机 - 简书 (jianshu.com)
实践:
刚开始时最好先了解一下 C 语言(其他也行),但如果0基础,需要注意每一个语句的作用和写法。这里只会讲解一些核心函数,语法不会详细讲解(如:while循环,for循环等)。
搭建环境:
这里使用 Arduino IDE 作为开发环境,Arduino UNO 作为开发板。
Arduino IDE 下载:Arduino - Windows
Arduino UNO:

软件下载完毕后,将开发板与电脑使用 USB 线连接,如果在设备管理器中未识别成功,考虑安装驱动,如果失败,则上网查找 CH340 驱动下载。
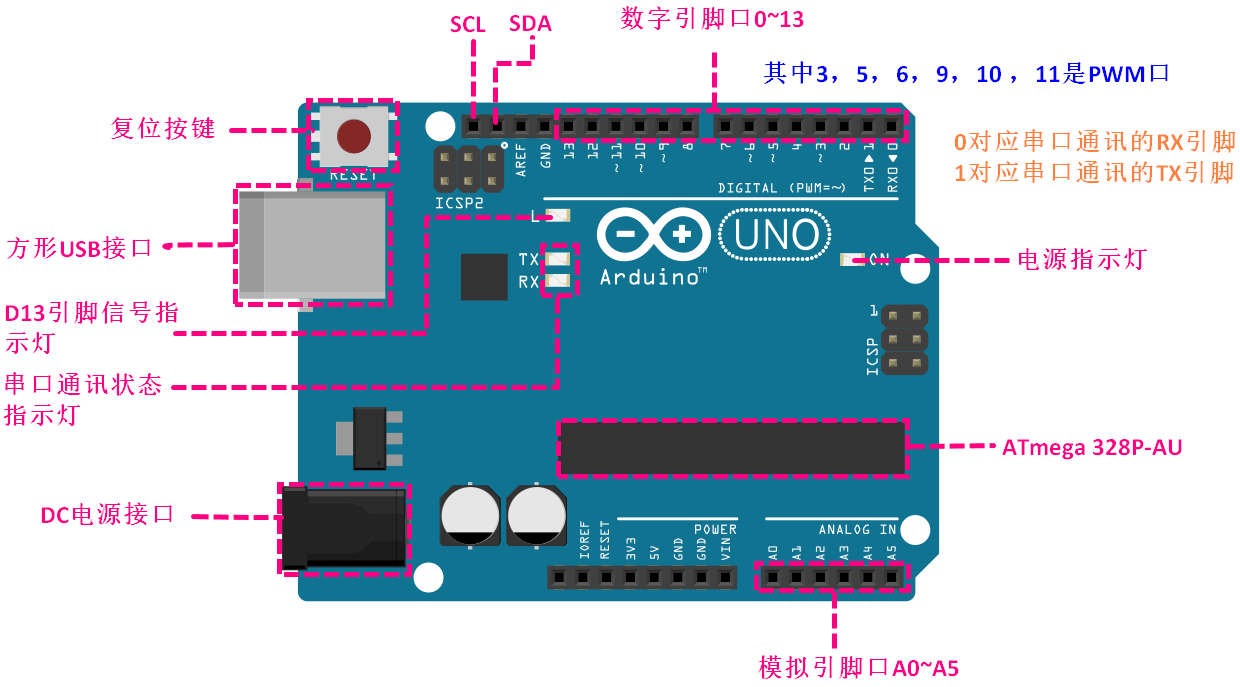
认识开发板:
Blink示例:
这里列举点灯例程(硬件世界的 Hello World):
1.将1个LED灯长引脚(正极)连接220Ω电阻后连接 Arduino 板上的数字脚0。
2.将此LED灯短引脚(负极)连接 Arduino 板上的 GND 。
3.复制此代码,上传,观察效果。
注意" () ; , "等符号为英文符号。(如果硬件上不想接线,可以将代码中0号引脚改为13号,使用板载 LED )
x1void setup(){2 pinMode(0, OUTPUT); //将0号引脚设为输出。3}4
5void loop(){6 digitalWrite(0, HIGH); //0号引脚设为高电平。7 delay(1000); //延迟1秒。8 digitalWrite(0, LOW); //0号引脚设为低电平。9 delay(1000); //延迟1秒。10}可以看见 LED 以 1Hz 频率闪烁。
程序解读:
其中“ void setup() ”函数在程序开始执行时只调用一次,使用它初始化变量、初始化外设等。
这里使用“ pinMode ”函数将0号引脚配置为输出引脚。
而“ void loop() ”函数会不断重复执行。
在这里,使用“ digitalWrite “函数将0号引脚设置为高电平(5V,HIGH),一秒后(delay 函数)设置为低电平(0V,LOW),等待一秒后循环。
ADC、PWM示例:
-ADC ( Analog to Digital Converter ):
模拟数字转换器即 A/D 转换器,或简称 ADC ,通常是指一个将模拟信号转变为数字信号的电子元件。
-PWM ( Pulse Width Modulation ):
脉宽调制是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM 信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。

以下是 Arduino 读取 A3 引脚模拟信号并以 PWM 形式对 LED 调光的例程:
1.将1个LED灯长引脚(正极)连接220Ω电阻后连接 Arduino 板上的引脚9。
2.将此LED灯短引脚(负极)连接 Arduino 板上的 GND 。
3.将一个电位器阻值不固定的两端分别接 A3 和 GND 。
4.复制此代码,上传,旋转电位器,观察效果。
xxxxxxxxxx151int ledPin = 9; //将LED连接至9号引脚2int AnalogPin = A3; //A3引脚作为模拟输入3
4int val = 0; //将读取到的模拟值赋给变量val5
6void setup(){7 pinMode(AnalogPin, INPUT); //将AnalogPin(A3)设置为输入引脚8 pinMode(ledPin, OUTPUT); //将ledPin(9)设置为输出引脚9}10
11void loop(){12 val = analogRead(AnalogPin); //读取并赋值13 14 analogWrite(ledPin, val/4); //输出PWM到LED15}//模拟值读出后是一个0-1024的值,但每字节的大小为0-255,所以这里将值除以4再输出可以看见随着电位器旋转, LED 亮度不断变化。如果有示波器,可以发现 PWM 波频率固定在 430Hz。
程序解读:
analogRead() 和 analogWrite() 为核心函数。
串行通讯:
所有 Arduino 控制器都有至少一个串行端口(也称为UART或者USART)。个人电脑可以通过 USB 端口与Arduino的引脚0(RX)和引脚1(TX) 进行通信。你可以通过 Arduino 开发环境软件中的串口监视器来与 Arduino 控制器进行串口通信。
这里展示最基本示例:
xxxxxxxxxx101void setup(){2 Serial.begin(9600); //波特率为96003}4
5void loop(){6 Serial.print("Hello World!");7 Serial.println("换行输出");8 Serial.println(millis()); //获取Arduino开机后运行的时间长度9 delayMicroseconds(1000000); //等待1000000微秒10}可以在串口监视器里看见打印的数据。
程序解读:
Serial.print() , Serial.println() 用于打印数据,millis() 用于获取 Arduino 开机后运行的时间长度。
delayMicroseconds() 与 delay() 函数都可用于暂停程序运行。不同的是,delayMicroseconds() 的参数单位是微秒。
使用库:
通过库的使用可以拓展 Arduino 开发板的功能。因为有了库,我们可以很轻松的实现 Arduino 与外部硬件的协作或进行数据通讯。
Arduino IDE 预装有一系列标准库文件,同时您也可以自己将第三方库(如:网上下载的开源库)安装导入Arduino IDE ,甚至您自己也可以建立库并导入 Arduino IDE 。
Arduino标准库有:
- EEPROM – 读写开发板内置EEPROM,“永久”保存数据。
- Servo – 控制舵机(伺服电机)
- Stepper – 控制步进电机
- SD – 读写SD卡
- Wire– 通过TWI/I2C实现多台开发板或传感器的相互通讯
- LiquidCrystal – 控制显示液晶屏(LCD)
- SPI – 用串行外设接口(SPI)进行通讯
接下来我将依次给出教程:
EEPROM:
EEPROM:Electrically Erasable, Programmable Read-Only Memory 。电可擦除可编程只读存储器。
简单来说 EEPROM 就像是一个硬盘,所以即使掉电,存放在 EEPROM 中的数据也可以保存下来,方便再次上电的时候进行读取操作。
ATmega328 内部具有 1kB 的 EEPROM 。
注意:EEPROM的 写入/擦除 寿命为100000次左右。
示例:
1.硬件上无需连线。
2.上传代码。
xxxxxxxxxx321//写入:2//导入库3
4int addr = 0; // 从地址0开始写5
6void setup(){7
8}9
10void loop(){11 int val = analogRead(0) / 4;12 EEPROM.write(addr, val); //在地址0写入值13 delay(1000);14}15
16//读取:17
19int address = 0;20byte value;21
22void setup() {23 Serial.begin(9600);24}25
26void loop(){27 value = EEPROM.read(address); //读取地址0的值28
29 Serial.print(value, DEC); //串口打印30 Serial.println();31 delay(1000);32}
Servo:
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。在高档遥控玩具,如飞机、潜艇模型,遥控机器人中已经得到了普遍应用。
舵机安装了一个电位器(或其它角度传感器)检测输出轴转动角度,控制板根据电位器的信息能比较精确的控制和保持输出轴的角度。
舵机转动的角度是通过调节 PWM 信号的占空比来实现的。标准的PWM信号的周期固定为20ms,理论上脉宽分布应该在1ms到2ms之间,实际上可由0.5ms到2.5ms之间,脉宽与转角0°—180°相对应。
舵机一般都外接三根线,分别用棕、红、橙三种颜色进行区分,由于品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。

示例:
1.控制线接9。剩余两根接电源。
2.上传代码。
xxxxxxxxxx191
3Servo myservo; // 定义Servo对象来控制4int pos = 0; // 角度存储变量5
6void setup() {7 myservo.attach(9); // 控制线连接数字98}9
10void loop() {11 for (pos = 0; pos <= 180; pos ++) { // 0°到180°12 myservo.write(pos); // 舵机角度写入13 delay(5); // 等待转动到指定角度14 }15 for (pos = 180; pos >= 0; pos --) { // 从180°到0°16 myservo.write(pos); // 舵机角度写入17 delay(5); // 等待转动到指定角度18 }19}舵机在0°和180°间不断转动。
Stepper:
步进电机是一种将电脉冲转化为角位移的执行机构。
这里使用的步进电机型号为28BYJ-48,1相励磁方式驱动,通过给ABCD四相依次通电来实现转自不停转动。控制板型号为 ULN2003 驱动板。

示例:
1.ULN2003驱动板上IN1、IN2、IN3、IN4分别连接UNO开发板的数字引脚2,3,4,5;
驱动板电源输入+、-引脚分别连接UNO开发板的5V、GND。
2.上传代码。
xxxxxxxxxx391void setup() {2 // put your setup code here, to run once:3 for (int i = 2; i < 6; i++) {4 pinMode(i, OUTPUT);5 }6}7
8void clockwise(int num)9{10 for (int count = 0; count < num; count++)11 {12 for (int i = 2; i < 6; i++)13 {14 digitalWrite(i, HIGH);15 delay(3);16 digitalWrite(i, LOW);17 }18 }19}20
21void anticlockwise(int num)22{23 for (int count = 0; count < num; count++)24 {25 for (int i = 5; i > 1; i--)26 {27 digitalWrite(i, HIGH);28 delay(3);29 digitalWrite(i, LOW);30 }31 }32}33
34void loop() {35 // put your main code here, to run repeatedly:36 clockwise(512);37 delay(10);38 anticlockwise(512);39}可见电机180°正反转。
SD:
上文讲到数据可以存储在 EEPROM 中,但如果要存储大量数据,Arduino 1Kb 的存储空间就力不从心了,但是我们可以挂载 SD 卡,拓展出大量空间。
这是这里所用的 Micro SD Card 模块:

还没写完……